Автор
статьи:
Иванайский Анатолий Васильевич.
Анализ
имеющейся информации.
Махолета
нет, хотя в природе он даже очень есть. Дано детальное описание движений крыла
птицы и многократно пытались воспроизвести его динамику на махолете. Результат
отрицательный. Признают, что движение крыла – колебательное движение,
передающее упругий момент силы на движение птицы. Просчитан даже КПД Махолета,
птицы.
Проведем
экспертизу имеющихся махолетов.
Все
конструкторы идут по аналогии с заменой крыла на аналогичное техническое
решение с точно такой же динамикой. Скорее всего, первый махолет будет похож на
птицу как современный лайнер на этажерку
братьев Райт. Птица-лайнер, махолет-этажерка.
Речь
идет о анологичной замене крыла на элементы,
отличающиеся по внешнему виду, но выполняющие ту же функцию, и находящиеся в
любом месте махолета, как и двигатели у самолета. Летают даже небольшие модели.
Постановка
проблемы.
Как
работает крыло? Большинство авторов отрицают связь между динамикой хвоста и
крыла птицы. Все сходятся на мысли, что опора на среду возникает только при
движении крыла вниз. Что абсолютно неверно.
Какая
частота взмахов крыла? Как она зависит от размеров крыла (площадь опоры) и
относительной скорости в среде? Какие варианты двигателя имеются в природе, и какие
бы мог использовать человек? Как площадь крыла влияет на величину тяги? Какой
двигатель нужен для махолета для приведения в движение конструкции двигателя?
Теоретическая
модель.
Двигатель
хвост (у рыб), и двигатель маховое перо (у птиц), совершают в среде аналогичные
движения и за счет упругого взаимодействия со средой передают движение вперед,
независимо от направления полета птицы, рыбы.
|
|

Крыло
птицы работает и как крыло самолета, создавая подъемную силу ближней частью
крыла к телу. Крыло птицы, т.е. является и двигателем и крылом планера, но для
махолета можно эти две функции разделить. Крыло отдельно, двигатель отдельно.
Крыло работает на передачу импульса вперед в любой момент времени его движения.
Возможны два варианта передачи энергии на среду.
За счет абсолютной упругости двигателя. Примером может служить любая
аквариумная рыбка, плавники ската. Передача усилия на среду осуществляется по
синусоиде или части ее, но не менее П\4 одного
колебания. Если требуется передать большую мощность на среду
используется более жесткий двигатель, но передача колебательного
движения осуществляется уже по второму варианту.
|
|

До
двигателя есть еще часть гибкой системы, доводящей движение в среде до
синусоидального, что невозможно было бы при прямой передаче усилия на хвост или
маховое перо.
Как,
например, могла бы выглядеть схема судового двигателя, с шарнирным приводом.
По
второму варианту работает нога с ластами аквалангиста.
Форма
двигателя не имеет значения в природе, это почти прямоугольная фигура у
махового пера птицы, треугольная у акулы, трапеции –
хвост рыбы, ласты.
|
|

Огромное
значение имеет материал, особенно его упругие свойства. Изменение жесткости от
основания двигателя к концу, и, соответственно, увеличивается гибкость и
упругость.
Пример
крыла птицы показывает, что при достаточном расстоянии между двигателями, они
могут работать в пакете параллельно друг от друга, что сразу уменьшает габариты
и увеличивает площадь опоры на среду. Рассматривая величину силы и давление на
двигатель в воздухе можно отметить, что она невелика и колеблется от 500 до
1500 Па, в зависимости от степени гибкости махового пера, размеров и скорости
полета.
По
второму варианту крепления двигателя можно увеличить давление в 10-100 раз, что
тоже позволит уменьшить размеры двигателя. На махолет массой 500 кг нужен
двигатель от 6 м кв. до 2 м кв. суммарной площади, с тягой до 1000 Н.
Если
пойти по 2 варианту крепления двигателя и увеличить его поперечную скорость
(при падении КПД), то размеры двигателя уменьшатся до 0,6 м кв.
Все
это относится и к передвижению в воде, но поправка на разницу в плотности будет
около 800.
|
|

Расстояние
между плоскостями двигателя равны удвоенному поперечнику.
В этом случае каждый работает отдельно в воздушном или водном потоке. Частоты
взмахов крыла у животных различна, но вот одинаковой остается поперечная
скорость маховых перьев и у самой маленькой и самой большой птицы. Это говорит
о том, что маховое перо птицы идет на некотором пределе, после которого КПД
двигателя резко падает. Скорость двигателя относительно тела птицы колеблется
от 0,8 до 1 м/с. Несколько выше она
у летучих мышей, что однозначно указывает на низкую эффективность моноплана как
двигателя в воздухе, при этом летучие мыши практически не летают при сильном
ветре. Это подтверждает положение, что махолет с крылом-двигателем
маловероятная оптимальная конструкция.
Если
рассматривать зависимость площади двигателя, период колебания крыла и массы
птиц, то можно увидеть следующие зависимости:
|
|
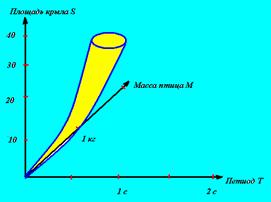
Отсюда
видно, что попасть в оптимальный режим трудно, это получается только для
небольших моделей махолетов, они и летают. При отклонении
поперечной скорости крыла, площади, несоответствие гибкости крыла махолет всю
энергию отдает на кавитационные схлопы
и должен в лучшем случае подпрыгивать на
месте.
Можно
обратить внимание и на то, что маховое перо в крыле птицы, работающее как
двигатель, и часть хвоста рыбы между лучами работают несогласованно с другими и
гасят вихревые ударные воздействия среды. Рыба может активно плавать в водопадах и водоворотах, птицы летают в
штормовую погоду в приземном слое воздуха.
Отдельно
стоит вопрос о двигателе для махолета. Обычный ДВС преобразует
возвратно-поступательное движение во вращательное и в махолете надо будет его
снова превращать в возвратно-поступательное. Нам
представляется двигатель с камерой сгорания отдельно, а горячие газы толкают
поршень как пар в цилиндре у паровоза, с такой же регулировкой и передающей движение
поршня на движение двигателя махолета.
В
заключение можно сказать, что возможность упругой опоры на среду человек пока
не использовал, хотя природа пошла именно по этому пути. При передвижении в
воздухе со скоростью 40-60 км/час махолет может быть более эффективным, чем
другие виды транспорта.
Махолеты по внешнему виду не
должны, хотя бы в первый период походить на птицу. Можно использовать
конструкцию дельтаплана, планера. Дельтаплан можно использовать и для создания двигаиеля от мускульной силы человека – велодельтапланер
– а это новый вид спорта.
Рыба-меч
имеет под водой скорость до 140 км/ч,
что еще раз подтверждает эффективность двигателя, аналогичная конструкция
подводного или надводного корабля представляла бы интерес для военных, где КПД
и затраты не очень важны, если аналогичная модель заработает в воздухе, то
разгонятся до космических скоростей можно было бы в плотных слоях, а фильмы о инопланетянах, путешествующих на ракетных двигателях в
плотных слоях атмосферы – это уже детские воззрения человечества.
С удовольствием обсужу с вами перспективы развития
махолетов,
и выслушаю ваши замечания по статье. Пишите мне по адресу:
IVAEWG@RAMBLER.RU